本文写于2017年12月,获Udacity专栏转载。今将其搬运至我的博客。
2016年3月,Alpha Go Master击败最强的人类围棋选手之一李世石。击败李的版本,在训练过程中使用了大量人类棋手的棋谱。2017年10月19日,DeepMind公司在《自然》杂志发布了一篇新的论文,AlphaGo Zero——它完全不依赖人类棋手的经验,经过3天的训练,Alpha Go Zero击败了Master版本。AlphaGo Zero最重要的价值在于,它不仅仅可以解决围棋问题,它可以在不需要知识预设的情况下,解决一切棋类问题,经过几个小时的训练,已击败最强国际象棋冠军程序Stockfish。其应用场景非常广泛。
AlphaGo Zero 采用了蒙特卡洛树搜索+深度学习算法,本文将尽可能用简单易懂的语言解释其工作原理。
树搜索

从一个棋盘的初始状态,开始思考下一步如何走。我们可以回顾一下我们思考的过程,我们会思考自己可以有哪几种走法,如果我走了这里,对手可能会走哪里,那么我还可以在哪里走。我和对手都会选择最有利的走法,最终价值最大的那一手,就是我要选择的下法。很明显这个思维过程是一颗树,为了寻找最佳的行棋点的过程,就是树搜索。
围棋第一手有361种下法,第二手有360种,第三手有359,依次类推,即一共有 361! 种下法,考虑到存在大量不合规则的棋子分布,合理的棋局约占这个数字的1.2%(Counting Legal Positions in Go). 约为2.081681994 * 10^170。这个一个天文数字,比目前可观测宇宙的所有原子数还要多。要进行完全树搜索,是不可能的。因此我们必须进行剪枝,并限制思考的深度。所谓剪枝,就是指没必要考虑每种下法,我们只需考虑最有价值的几手下法。所谓限制思考的深度,就是我们最多只思考5步,10步,20步。常见的算法是Alpha-beta剪枝算法。但是,剪枝算法也有它的缺陷,它很有可能过早的剪掉了后期价值很大走法。
蒙特卡洛方法
简而言之,蒙特卡洛方法(Monte Carlo method),是一种“统计模拟方法”。20世纪40年代,为建造核武器,冯.诺伊曼 等人发明了该算法。因赌城蒙特卡洛而得名,暗示其以概率作为算法的基础。
假设我们要计算一个不规则形状的面积,我们只需在包含这个不规则形状的矩形内,随机的掷出一个点,每掷出一个点,则N+1,如果这个点在不规则图形内则W+1。落入不规则图形的概率即为 W/N。当掷出足够多的点之后,我们可以认为:不规则图形面积=矩形面积*W/N。
要应用蒙特卡洛算法的问题,首先要将问题转化为概率问题,然后通过统计方法将其问题的解估计出来。
蒙特卡洛树搜索(MCTS)
1987年Bruce Abramson在他的博士论文中提出了基于蒙特卡洛方法的树搜索这一想法。这种算法简而言之是用蒙特卡洛方法估算每一种走法的胜率。如果描述的再具体一些,通过不断的模拟每一种走法,直至终局,该走法的模拟总次数N,与胜局次数W,即可推算出该走法的胜率为 W/N。
该算法的每个循环包含4个步骤:选择、扩展、仿真、反向传播。一图胜千言。

图中N表示总模拟次数,W表示胜局次数。每次都选择胜率最大的节点进行模拟。但是这样会导致新节点无法被探索到。为了在最大胜率和新节点探索上保持平衡,UCT(Upper Confidence Bound,上限置信区间算法)被引入。所谓置信区间,就是概率计算结果的可信度。打个比方,如果掷了3次硬币,都是正面朝上,我们就认为掷硬币正面朝上概率是100%,那肯定是错误的,因为我们的样本太少了。所以UCT就是用来修正这个样本太少的问题。具体公式如下:

其中wi 是i节点的胜利次数,ni是i节点的模拟次数,Ni是所有模拟次数,c是探索常数,理论值为 √2,可根据经验调整。公式的后半部分,探索次数越少,值会越大,所以,那些被探索比较少的点,会获得更多的探索机会。
蒙特卡洛树搜索算法因为是直接模拟到游戏终局,所以这种算法更加的准确,而且并不需要一个明确的“估值函数”,你只需要实现游戏机制就足够了。而且,蒙特卡洛算法,可以随时终止,根据其训练的时间给予近似的最优结果。
但是对于围棋这种游戏而言,它的选择点依然太多,这棵树会非常的大。可能有一个分支早已被丢弃,那么它将不会被统计,这可能是李世石能够在第四局击败AlphaGo的主要原因。对于这类情况,我们依然需要依赖一个好的估值函数来辅助。
深度学习
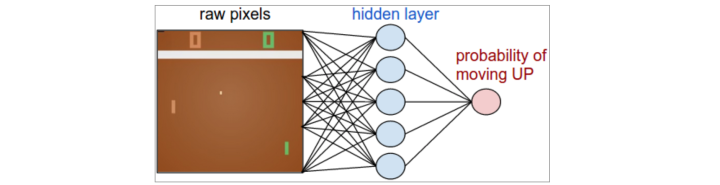
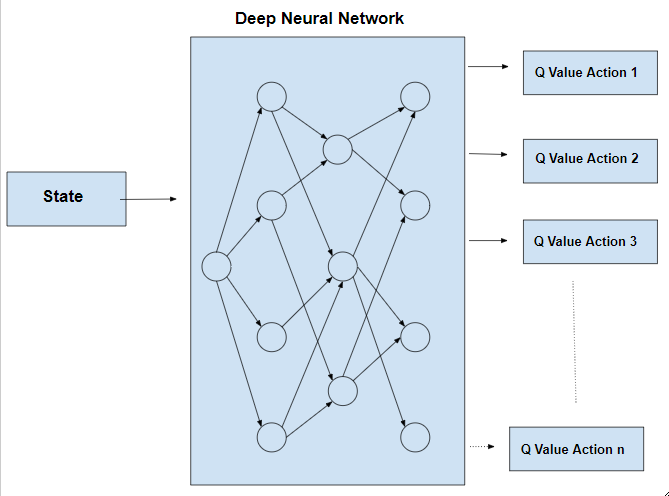
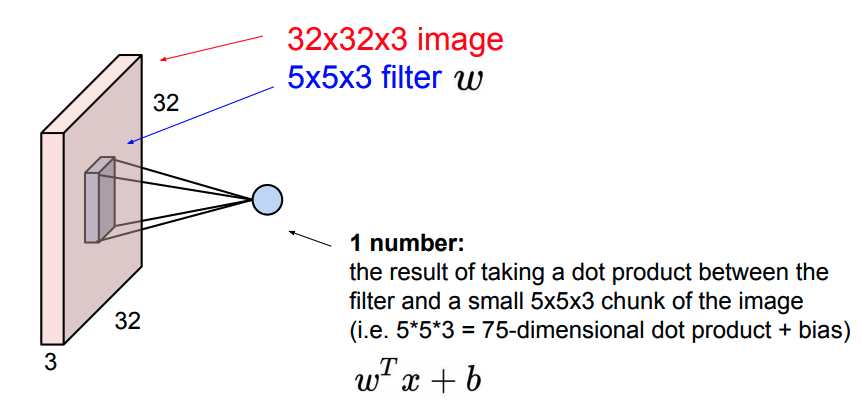
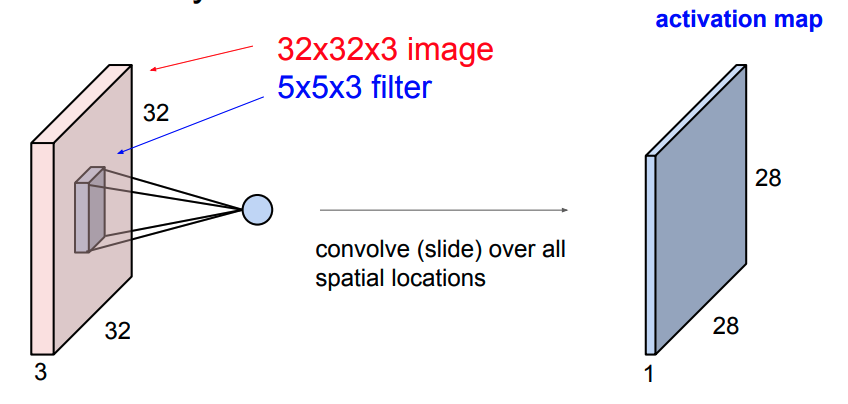
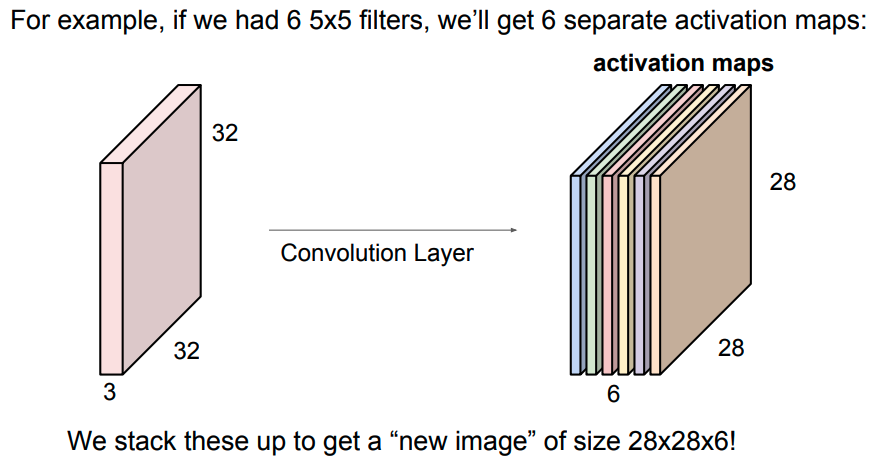
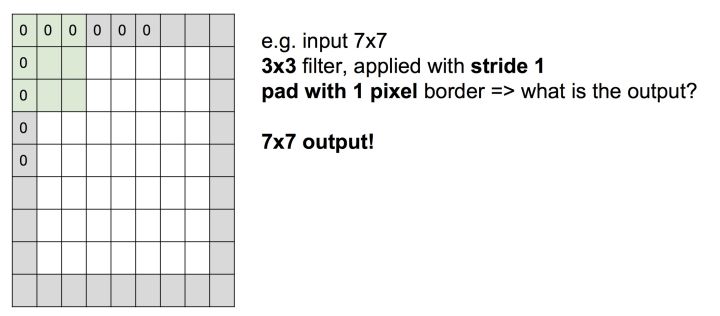
近年来,深度卷积神经网络在视觉领域取得很大的成功,如图片分类,人脸识别等。深度学习的网络结构在此不赘述,简而言之,深度学习是一个最优化算法。
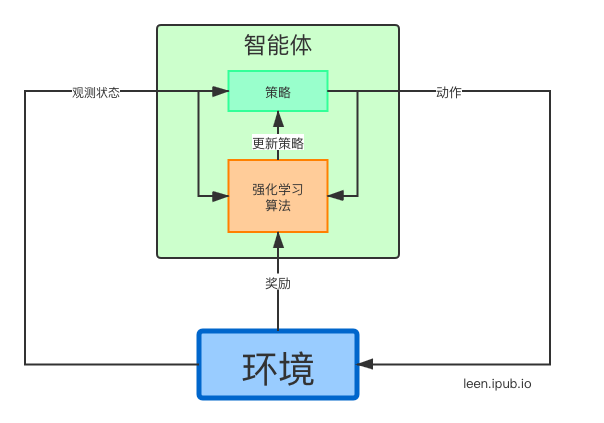
我们可以将深度神经网络理解为一个黑盒,这个黑盒接收一批输入,得到一个输出,并根据输出计算出损失(误差),这个误差会反馈给黑盒,当给了足够多的数据之后,这个黑盒将具备一个特性,就是使误差最小化。
如果这么说还是难以理解的话,可以打个比方:深度神经网络是一种生物,它喜欢吃糖,有学习的能力,你给它看一张图片,它告诉你是猫还是狗,如果它猜对了,你就给它一颗糖,猜错了,就不给糖,久而久之,它就有了分辨猫狗的能力。作为创造者,你甚至不知道它是如何分辨猫狗的,但是它做到了,看得越多,识别的就越准。
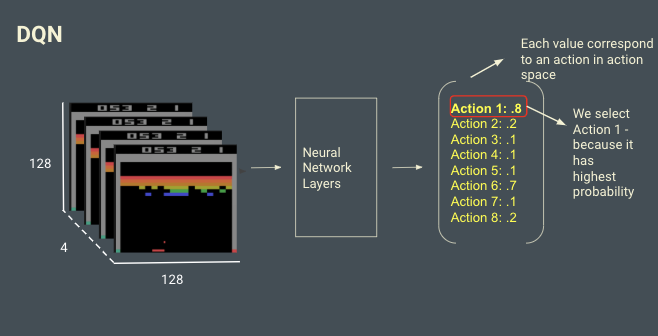
这里至关重要的是——输入是什么?输出是什么?什么时候给糖的动作,也就是损失函数如何设计?在实际的操作过程中,网络结构的设计也很重要,这里不再细述。
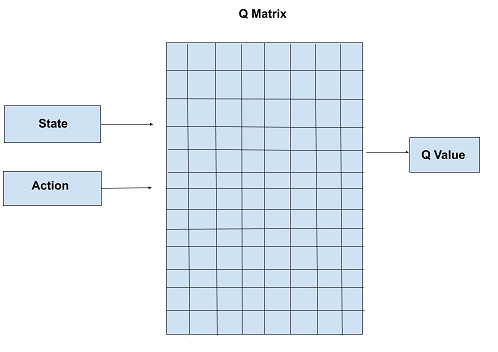
对于围棋来说,深度网络可以用来评估下一步的主要选点(降低树的宽度),以及评估当前局面的值。
AlphaGo Zero
在AlphaGo Lee版本,有两个神经网络,一个是策略网络,是一个有监督学习,它利用了大量的人类高手的对弈棋局来评估下一步的可能性,另一个是价值网络,用来评价当前局面的评分。而在AlphaGo Zero版本,除了围棋规则外,没有任何背景知识,并且只使用一个神经网络。
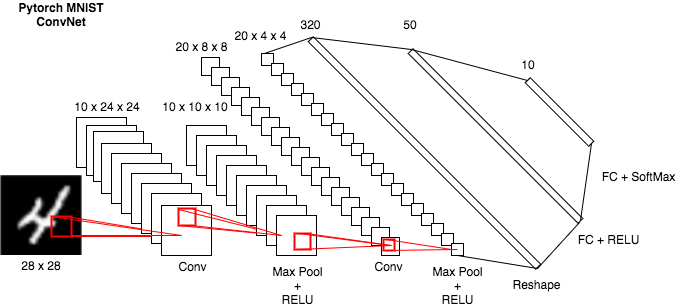
这个神经网络以19x19棋盘为输入,以下一步各下法的概率以及胜率为输出,这个网络有多个batch normalization卷积层以及全连接层。
AlphaGo Zero的核心思想是:MCTS算法生成的对弈可以作为神经网络的训练数据。 还记得我们前面说过的深度学习最重要的部分吗?输入、输出、损失!随着MCTS的不断执行,下法概率及胜率会趋于稳定,而深度神经网络的输出也是下法概率和胜率,而两者之差即为损失。随着训练的不断进行,网络对于胜率的下法概率的估算将越来越准确。这意味着什么呢?这意味着,即便某个下法AGZ没有模拟过,但是通过神经网络依然可以达到蒙特卡洛的模拟效果!也就是说,我虽然没下过这手棋,但凭借我在神经网络中训练出的“棋感”,我可以估算出这么走的胜率是多少!
AlphaGo Zero的对弈过程只需应用深度网络计算出的下法概率、胜率、MCTS的置信区间等数据即可进行选点。
AlphaGo Zero 论文节选

a:自我对弈过程s1,…,sT。 在每个状态st, 使用最近一次的网络fθ,执行一次MCTS αθ (见图2)。 下法根据MCTS计算的搜索概率而选择,at ~ πt. 评价终止状态sT,根据游戏规则来计算胜利者z。
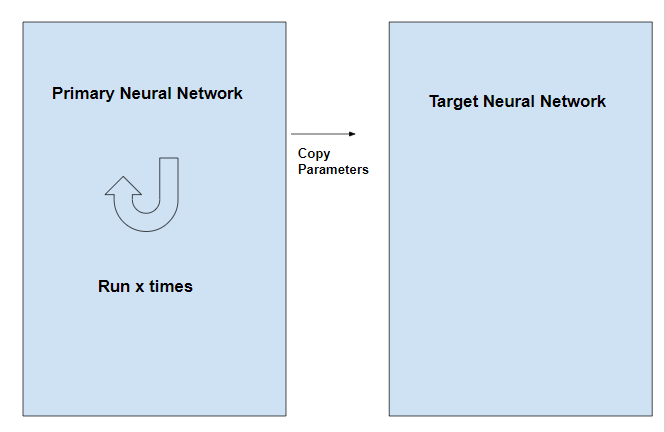
b: AlphaGo Zero的神经网络训练。网络使用原始的棋盘状态st作为输入,通过数个卷积层,使用参数θ,输出有向量 pt, 表示下法的分布概率,以及一个标量vt,表示当前玩家在st的胜率。网络参数θ将自动更新,以最大化策略向量pt和搜索概率πt的相似性,并最小化预测赢家vt与实际赢家z的误差。新参数将应用于下一次自我对弈a的迭代。

a: 每次模拟选择的分支,有最大Q+U, 其中Q是动作价值,U是上限置信,U依赖于一个存储在分支上的优先概率P和该分支的访问次数N(每访问一次N+1)。
b: 扩展叶节点,神经网络(P(s, .), V(s)) = fθ(s)评估s; 将向量P的值被存储在s的扩展边上。
c: 根据V更新动作价值(action-value)Q,反映所有该动作的子树的平均值。
d: 一旦搜索结束,搜索概率π被返回,与 Ν^(1/τ) 成正比,N是每个分支的访问次数,而τ是一个参数控制着温度(temperature)。
AlphaGo Zero的应用
AGZ算法本质上是一个最优化搜索算法,对于所有开放信息的离散的最优化问题,只要我们可以写出完美的模拟器,就可以应用AGZ算法。所谓开放信息,就像围棋象棋,斗地主不是开放信息,德扑虽然不是开放信息,但本身主要是概率问题,也可以应用。所谓离散问题,下法是一步一步的,变量是一格一格,可以有限枚举的,比如围棋361个点是可以枚举的,而股票、无人驾驶、星际争霸,则不是这类问题。Deepmind要攻克的下一个目标是星际争霸,因为它是不完全信息,连续性操作,没有完美模拟器(随机性),目前在这方面AI还是被人类完虐
所以看到AG打败人类,AGZ打败AG,就认为人工智能要打败人类了,这种观点在未来可能成立,但目前还有点危言耸听。距离真正打败人类,AGZ还差得很远。